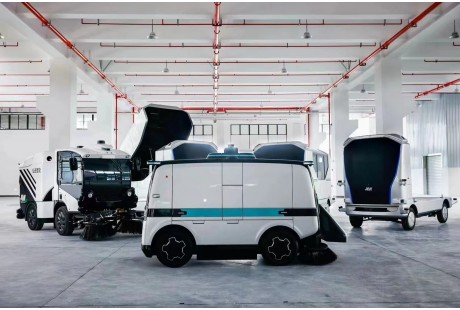
激光雷達在不同應用場景,訴求其實也各不相同。室內場景比如無人叉車或機器人在倉庫車間里搬運工作,也可能存在高粉塵的環境;室外場景更看重激光雷達的環境適應能力,尤其汽車在面臨灰塵、雨霧天的情況下,均無法穩定可靠的工作,比如無人礦卡粉塵非常多,還有在雨霧天的運行,都容易造成激光雷達檢測能力下降或者輸出汽車、機器人不需要的干擾點云,這個時候對激光雷達的可靠性又多了一份考驗。
激光雷達在實際應用中的確面臨著灰塵、雨霧等干擾因素。為了應對這些問題,鐳神智能車規級混合固態激光雷達CH128X1和多線機械式激光雷達C16/32進行全新升級,具備灰塵、雨霧識別過濾的特點。
車規級混合固態激光雷達CH128X1

鐳神智能將揚塵特性與點云算法進行大量的對比實驗計算,形成一套適用于礦卡運營工況的激光雷達灰塵過濾的算法。此套算法可結合鐳神智能任意一款激光雷達搭載在汽車上,根據客戶結合實際應用場景需求,CH128X1不斷進行多次的優化與提升,算法與數據學習突破盲點,解決無法識別灰塵過濾后的后方目標和感知精度問題,提升運行效率、穩定數據和安全性。不受環境灰塵、雨霧的約束,無論室內室外,都可以輸出點云信息,幫助識別目標物準確數據、導航、避障,最終取得突破性成果。
圖1 灰塵過濾功能優化前

圖2 灰塵過濾功能優化后
圖3 雨水過濾功能優化前

圖4 雨水過濾功能優化后
從圖1-2中,可以看到激光雷達周遭或前方已經有很多灰塵,但就激光雷達實際點云數據顯示來看,在灰塵點云大幅度減少的同時,還能穿透濃厚灰塵,檢測到后方的目標;圖3-4在下雨時,密集雨水的散點,會被當作障礙物,阻礙車輛或機器人的運動路線 ,在雷達去除雨水散點,可減輕上位機的數據處理負擔。由此可見,CH128X1感知更精準,靈敏度更高。
多線機械式激光雷達C16/C32

鐳神智能多線機械式激光雷達C16/C32 進行4.0改革升級,探測精度更高、探測點云更穩定、抗光干擾能力更強。另外,對灰塵、雨霧進行反復測試,具備灰塵識別過濾的效果,感知性能再上新臺階。
C16/32灰塵過濾功能優化前

C16/32灰塵過濾功能優化后
鐳神智能全場景激光雷達以高穩定高可靠的性能應用在不同領域,并得到了眾多行業知名客戶的認可。鐳神智能始終致力于解決客戶痛點,通過不斷調整和優化,提供安全、高效、高價值的感知產品。