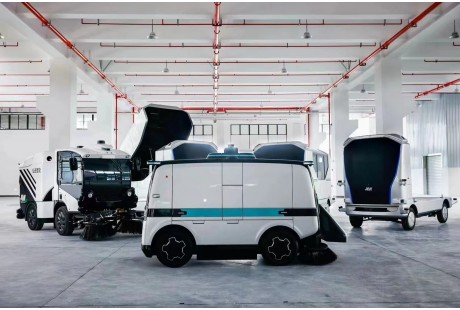
自動(dòng)駕駛汽車使用視頻監(jiān)控?cái)z像頭、雷達(dá)測(cè)距傳感器,GPS全球定位及電子地圖來獲取周圍的交通狀況,并通過一個(gè)詳盡的3D地圖對(duì)前方的道路進(jìn)行導(dǎo)航。因此,自動(dòng)駕駛汽車在行駛中需要具備對(duì)車身周圍所有物體做出迅速的精準(zhǔn)反應(yīng)。
車載電腦系統(tǒng)可分為前端與后端兩大模塊: 前端是對(duì)信息的采集,后端則是對(duì)來自前端的所有信息進(jìn)行快速數(shù)據(jù)邏輯分析,實(shí)時(shí)發(fā)出指令給汽車行駛控制模塊。顯然,實(shí)現(xiàn)這一目標(biāo),除了汽車軟件方面實(shí)現(xiàn)跨越性本質(zhì)突破之外,對(duì)硬件正常工作的穩(wěn)定性、精確度、抗干擾性等方面也提出了更高更嚴(yán)格的要求。芯片(又叫中央處理器,CPU)是汽車自動(dòng)駕駛系統(tǒng)中負(fù)責(zé)數(shù)據(jù)處理的大腦,而給它提供信號(hào)的電子元器件是晶振。可想而知,芯片的高效響應(yīng)性能離不開晶振不間斷提供更穩(wěn)定更精準(zhǔn)的信號(hào)源。
監(jiān)控系統(tǒng)模塊
自動(dòng)駕駛汽車的視頻監(jiān)控系統(tǒng)是在汽車上安置了數(shù)個(gè)高清攝像頭,用于識(shí)別交通信號(hào)燈,并在車載電腦的輔助下辨別移動(dòng)的物體,比如周邊車輛、自行車、行人或其它物體。貼片晶振27MHZ,50MHZ,54MHZ持續(xù)發(fā)出精準(zhǔn)穩(wěn)定信號(hào)給芯片是高清視頻捕獲及傳輸?shù)幕颈U稀?/p>
雷達(dá)測(cè)距系統(tǒng)模塊
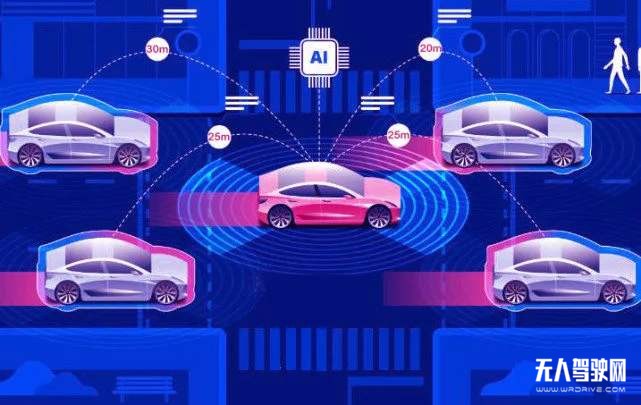
在雷達(dá)測(cè)距系統(tǒng)模塊中,使用的晶振為溫補(bǔ)晶振,它的特性是可以確保信號(hào)精準(zhǔn)穩(wěn)定的發(fā)射與接收。雷達(dá)測(cè)距系統(tǒng)在協(xié)助中央處理器針對(duì)汽車周邊物體間距方面提供不可或缺的關(guān)鍵數(shù)據(jù),以便讓汽車做出及時(shí)的正確反應(yīng),比如緊急制動(dòng),減速,或避讓。
GPS全球定位模塊
GPS全球定位模塊對(duì)行駛中的汽車進(jìn)行實(shí)時(shí)精準(zhǔn)定位,并給中央處理器提供實(shí)時(shí)路況,建筑物,交通信息等。負(fù)責(zé)精準(zhǔn)定位的晶振頻點(diǎn)是TCXO 26MHZ,它精度越高,穩(wěn)定性越好,定位越準(zhǔn)確。
中央數(shù)據(jù)處理模塊
中央數(shù)據(jù)處理模塊(CPU)的作用是接收并處理所有數(shù)據(jù),這些數(shù)據(jù)來自汽車監(jiān)控?cái)z像頭的實(shí)時(shí)畫面,雷達(dá)測(cè)距系統(tǒng)模塊的車身與周邊環(huán)境中物體的間距變化數(shù)據(jù),GPS實(shí)時(shí)定位數(shù)據(jù)等。中央數(shù)據(jù)處理模塊的作用在汽車自動(dòng)駕駛系統(tǒng)中是核心,它是總司令部。晶諾威建議它需要頻率信號(hào)更穩(wěn)定,驅(qū)動(dòng)功率更大的晶振。這款晶振的名稱叫差分晶振,它具備可以同時(shí)輸出兩個(gè)頻率信號(hào)的功能,其另一優(yōu)勢(shì)是具備高可靠性及高精度。
最后,感謝5G時(shí)代的到來,它可以憑借高達(dá) 20Gbps/s 的峰值數(shù)據(jù)速率,幫助自動(dòng)駕駛汽車實(shí)現(xiàn)實(shí)時(shí)的數(shù)據(jù)交換,很大程度上避免了因信息延時(shí)造成的潛在行車安全隱患。