不夸張的說(shuō),如果現(xiàn)在沒(méi)有手握幾項(xiàng)無(wú)人駕駛技術(shù)的專利,都不好意思說(shuō)自己是大的互聯(lián)網(wǎng)/汽車公司。
無(wú)人駕駛技術(shù)定義很簡(jiǎn)單,就是一項(xiàng)可以感知周圍道路環(huán)境,自動(dòng)規(guī)劃路徑并控制車輛行駛的技術(shù),具體構(gòu)成分為三個(gè)核心系統(tǒng)——視覺(jué)系統(tǒng),控制系統(tǒng),以及導(dǎo)航系統(tǒng)。
我們可以設(shè)想一個(gè)場(chǎng)景,如果開(kāi)車去某地,我們通常的操作就是打開(kāi)地圖設(shè)定好目的地,再根據(jù)導(dǎo)航規(guī)劃的路線行駛,然后行駛的過(guò)程中,通過(guò)眼睛觀察周圍的道路環(huán)境,實(shí)時(shí)根據(jù)路況控制車輛前行。
而完成上述的操作,我們需要具備三個(gè)條件,實(shí)現(xiàn)導(dǎo)航的地圖,實(shí)時(shí)感知能力,以及控制車輛的能力。
以此分析,無(wú)人駕駛技術(shù)如果想要實(shí)現(xiàn)車輛自主駕駛就必須具備上述的三個(gè)條件,所以就有了視覺(jué)系統(tǒng)——感知周圍的環(huán)境,控制系統(tǒng)——操控車輛的行駛,導(dǎo)航系統(tǒng)——協(xié)助實(shí)現(xiàn)路徑規(guī)劃。
對(duì)于視覺(jué)系統(tǒng),我個(gè)人是比較熟悉,因?yàn)楫?dāng)年大學(xué)的畢業(yè)設(shè)計(jì),我主要負(fù)責(zé)的就是無(wú)人駕駛方程式賽車的視覺(jué)系統(tǒng)。
視覺(jué)系統(tǒng)說(shuō)白了就是一項(xiàng)感知技術(shù),負(fù)責(zé)采集信息的設(shè)備也都是常見(jiàn)的超聲波雷達(dá)、毫米波雷達(dá)、激光雷達(dá),以及車載攝像頭這些傳感器。
其中,雷達(dá)主要的作用是通過(guò)接收超聲波/電磁波/激光信號(hào)來(lái)感知周圍的障礙物,并且通過(guò)發(fā)出信號(hào)與接受信號(hào)的時(shí)間差來(lái)判斷車輛與障礙物之間的距離;
車載攝像頭則是采集圖像信息,再將圖片轉(zhuǎn)換成二維的數(shù)據(jù)信息,然后通過(guò)數(shù)據(jù)的匹配來(lái)識(shí)別車輛周圍的環(huán)境。
換而言之,視覺(jué)系統(tǒng)實(shí)際上就是通過(guò)這些多傳感器的融合,來(lái)采集可行駛區(qū)域分割、車道線檢測(cè)、車輛行人等目標(biāo)檢測(cè)及視覺(jué)測(cè)距的信息。
繼而再建立統(tǒng)一的坐標(biāo)系,判斷車輛自身在路面上的相對(duì)位置,以及車輛周圍目標(biāo)相對(duì)于車輛自身的位置和運(yùn)動(dòng)狀態(tài)。
再有了環(huán)境感知能力之后,接下來(lái)就輪到了控制系統(tǒng)出場(chǎng)。
控制系統(tǒng)可分為三個(gè)模塊,底層控制、中層控制、高層控制。
其中,底層控制分為車輛縱向控制和橫向控制,顧名思義也就是控制車輛的行駛(包括加速減速),以及轉(zhuǎn)向等行駛操作。
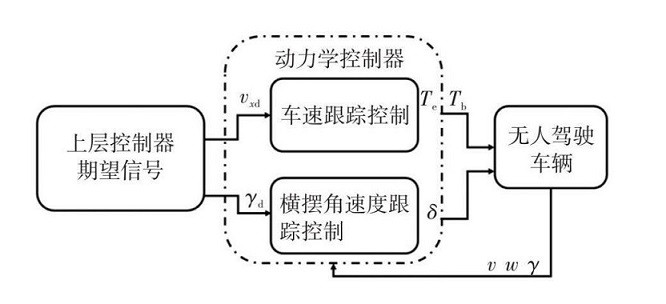
主要原理就是在接受到高層控制發(fā)出的期望信號(hào)之后,通過(guò)大量的算法來(lái)控制各大系統(tǒng)(轉(zhuǎn)向、制動(dòng)、動(dòng)力)的控制器,比如轉(zhuǎn)向盤的轉(zhuǎn)角、油門踏板的開(kāi)度等等,實(shí)現(xiàn)車輛的行駛操作。
而中層控制,我認(rèn)為這是控制系統(tǒng)中最難設(shè)計(jì)的一個(gè)部分,因?yàn)樗墓δ芎芟裎覀內(nèi)梭w的感知反應(yīng)能力。也就是當(dāng)遇到不確定情況時(shí),如何控制車輛,讓其根據(jù)當(dāng)時(shí)的環(huán)境做出最佳的反應(yīng)(模擬人的反應(yīng))。
這其中涉及到了一個(gè)深度的自主學(xué)習(xí)能力。也就是說(shuō),無(wú)人駕駛車輛需要構(gòu)建很多個(gè)環(huán)境信息模型,或者說(shuō)數(shù)據(jù)庫(kù),來(lái)作為一個(gè)參考信息,而車輛則需要通過(guò)自主學(xué)習(xí)來(lái)識(shí)別并分類好這些信息模型。
當(dāng)這些信息模型全都被深度學(xué)習(xí)標(biāo)記了之后,算法會(huì)根據(jù)被標(biāo)記的信息模型,預(yù)測(cè)該模型的運(yùn)動(dòng)軌跡,然后結(jié)合當(dāng)時(shí)情況,計(jì)算出最佳的行駛路徑,減少碰撞的危險(xiǎn)。
而之所以說(shuō)它難,是因?yàn)橐粊?lái)有很多的不確定,不知道潛伏了哪些危害,二來(lái)模擬人的感知反應(yīng)對(duì)算法模型的要求很高,三來(lái)這還面臨很多倫理道德的問(wèn)題(比如撞一只貓還是撞一幅名畫(huà))。
所以無(wú)人駕駛要想全面普及,這三個(gè)問(wèn)題必須得解決。
至于高層控制,其主要功能是路徑規(guī)劃和道路導(dǎo)航,這有點(diǎn)類似于傳統(tǒng)意義上的“腦力活動(dòng)”。
因?yàn)樗峭ㄟ^(guò)一些搜索算法來(lái)做一些智能化的判斷,一般用于評(píng)估各種駕駛行為所需支付的成本,比如等紅綠燈的時(shí)間,道路擁堵的情況,信號(hào)燈的數(shù)量等信息的搜索,然后根據(jù)搜索的情況,分析出一條最佳路線,極大的減少我們的用車成本。
這種邏輯就很像我們?nèi)嗽谒伎迹?ldquo;哪條路是捷徑”,“這條路我是否可以加快點(diǎn)速度”之類的問(wèn)題。
而與高層控制互相配合的就是導(dǎo)航系統(tǒng),其利用GPS,以及高清數(shù)字地圖,提供地圖數(shù)據(jù)信息,協(xié)助高層控制模塊,規(guī)劃路徑。
GPS可以幫助車輛定位位置,而高清數(shù)字地圖則是提供非常非常精確的地圖數(shù)據(jù),輔助感知周圍環(huán)境信息,以達(dá)到一定精確度要求。
總而言之,目前無(wú)人技術(shù)的大致框架就是如此,無(wú)人駕駛的技術(shù)遠(yuǎn)遠(yuǎn)不止這些,畢竟僅僅是一個(gè)算法模型比如卡爾曼濾波法、多貝葉斯估計(jì)法、Dempster-Shafer(D-S)證據(jù)推理等。