10月17日-19日,2019年中國計算機大會在蘇州舉辦,本屆大會以“智能 引領社會發展”為主題,1000家機構的代表、8000余人參展參會。阿里巴巴自動駕駛實驗室主任、首席科學家在會上發表了《自動駕駛沒有免費的午餐》的主題演講。

王剛認為,單用一套通用的自動駕駛算法很難覆蓋復雜多樣化的交通場景,需要將多場景問題進行分解、細化,有針對性的解決。王剛認為,自動駕駛的研發依賴于三個要素:精細化場景、針對性算法和自動化平臺。
自動駕駛是智慧城市里面非常重要的一個部分,也可以說是人工智能里最復雜的一個系統,非常具有挑戰性。我今天主要想講講,阿里巴巴在自動駕駛系統上的一些思考和觀點。
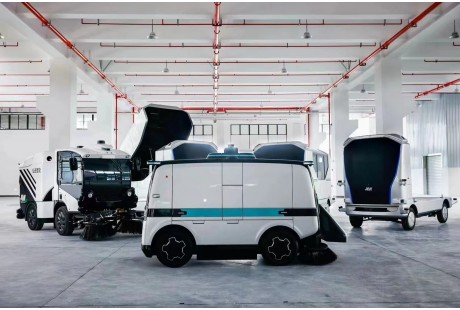
關于自動駕駛,很多公司都在做載人的自動駕駛。阿里跟他們不一樣,從一開始關注的就是物流行業的自動駕駛,怎么讓物流車變得無人化。
阿里為什么要選擇這個行業?大家都聽說過,去年的“雙11”活動,光“天貓”一個電商平臺就產生了1億個包裹。未來以天貓、淘寶為代表的電商平臺,包括餓了么、盒馬代表的本地生活平臺將會產生越來越多的包裹。有人做了一個預測:五年之后,物流包裹可能會突破5億個/每天。
與龐大的包裹數量形成反差的是,我們社會的老齡化非常的嚴重,年輕人在慢慢變少。在可以預見的未來,社會將會缺乏足夠的勞動力去運輸這些包裹。因此阿里相信,物流車的無人化是整個物流產業發展的必然選擇,也是社會發展的必然選擇。
阿里目前專注于兩個物流場景:第一是末端物流場景,最后1~3公里的問題。這應該是未來幾年內最容易實現落地的場景,其在安全、法律上的挑戰都相對少一些。除了末端物流之外,阿里也在做公開道路的技術研發,自動駕駛必然會從末端走向開放道路。我們也在杭州街頭進行了常態化路測以及相應的研發工作。
阿里的無人車不僅可以應對各種復雜的開放道路路況,包括轉彎、與非機動車輛以及行人的交互,還能在復雜的城市道路實現3000公里的自動駕駛,而不需要人工的監管。
以場景精細化應對交通多樣化
最近幾年,國內外的無人駕駛公司都取得了非常大的技術進步,但從客觀來看,自動駕駛還存在非常多的困難和挑戰,目前還沒有能夠完全落地的產品。
自動駕駛為什么這么難?不同的人有不同的看法:硬件還沒準備好、基礎交通設施不夠完善,但是阿里認為智能系統或者軟件是最上層的內容。多數情況下,還沒落地是因為自動駕駛的算法還不能夠處理道路上的復雜交通狀況。
在阿里內部,有稱之為cut-in的場景,即別的車輛跑在了自動駕駛車的前面。很多人認為這是一個非常簡單的場景,但我們發現由于車輛的側車型不一樣,cut-in的原因也不一樣,導致的行為方式也是非常不一樣的。很多時候,自動駕駛算法不能有效處理這么多復雜、多樣化的場景。這對自動駕駛來說是一個非常大的挑戰。
交通場景過于復雜、多樣化,那要怎么處理這樣多樣化的場景?我認為,我們非常有必要回想人工智能里的經典理論,比如no free lunch理論。
這個理論是講,假如用一種通用算法來解決所有問題,是不可能在所有的問題上都取得很大成功的。相反,需要針對每一個問題進行相對應的研發,針對性的優化可以取得更好的結果。
這個理論在自動駕駛領域也是適用的。交通場景眾多,很難用一套或者幾套通用的自動駕駛算法去解決問題。相應地,阿里希望能夠把自動駕駛的多場景問題進行分解、細化,有針對性的解決,這也是阿里稱之為的“自動駕駛里的no free lunch”理論。
將交通場景進行分類,聽上去很簡單,但仔細考慮就會發現這是一個非常復雜的問題。我覺得一個好的分類至少要滿足兩個標準:
第一,分類必須非常精細化,粗粒度的分類是不能分解問題、降低問題的難度的;第二,分類必須為算法服務,跟算法高度融合,而不是為了測試和管理服務。
我們也審視了業界常用的分類方法,發現離這兩個標準還有非常大的距離。有人按照行駛環境來分類,按高速、城市道路、鄉村道路來分,這樣粗粒度的分類,無法把問題分解為更簡單的問題。
也有人按場景要素來分,按照物體類型、天氣等情況進行組合。我們也發現,很多組合非常冗余并且和算法是沒有關系的。因此從這兩個角度來看,現有的場景分類方式都不夠理想。
基于此,阿里內部提出了自己的自動駕駛場景庫,阿里巴巴中央場景庫。我們的場景庫有非常典型的分類。我們聯合感知和決策,有針對性地對場景類別進行開發。比如感知到場景后,決策環節可以預先做一些判斷,把速度降下來,避免事故的發生。我們的分類是針對算法來進行開發的。
這種分類方法的一個特點是,非常精細化。還是以cut-in場景為例,我們的場景庫里cut-in分為25個子類。通過精細化分類可以把非常復雜的cut-in問題降解為25個比較容易解決的問題。
這些分類是怎么產生的?過去,分類主要是由專家來設計,根據對場景的理解得出結論。遺憾的是,這些理解是非常粗粒度的,到不了非常精細的程度。而阿里采用的是數據驅動的方法,通過搜集大量的路測數據,從數據里挖掘、發現什么樣的場景是算法更應該關注的場景,從而形成精細化的分類。
另外一個特點是,我們的分類包括很多動態化的場景,比如與社會車輛、行人的交互。如果路上沒有其它車輛,自動駕駛就不是一個難題了。因此動態場景才是自動駕駛最大的困難,我們也基于數據驅動的方法得到這些動態場景。單純的人工去設計很難描述動態場景,因此也很容易錯失一些重要的場景分類。
基于精細化場景的算法問題
基于這個自動駕駛場景庫和no free lunch理論,需要針對每個場景分類做相應的算法開發。可以想象的是,假如有1000個場景分類,我們需要開發1000個不同的算法來解決問題。這是一個非常巨大的災難。因為現在算法的開發模式稱之為“人工 智能”,算法的設計極度依賴自動駕駛工程師的領域知識,包括規則、算法模型、超參數等。所以這也是自動駕駛公司在市場上處于供不應求狀態的原因。
這樣分類方法必然在研發效率上帶來很大的局限性。阿里也在通過計算換智能的方式來研發。這個詞并不新鮮,人工智能尤其是深度學習,本質上就是計算換智能。
最開始可能需要依賴計算機視覺和圖像處理專家來進行人工設計,但可能會喪失非常重要的信息。深度學習被發明之后,可以通過神經網絡、計算去搜索、找到最好的設計,從而提升了研發的效率和質量。
但非常遺憾是,這樣的方式在自動駕駛領域應用的并不多,其滲透率還遠遠不夠。有以下幾個原因:一個原因是設計理念上的差別;另一個原因是基礎設施以及工程平臺的缺失。這兩個原因導致了我們在自動駕駛上對人工的依賴過于嚴重。
數據驅動的自動化平臺
為解決這個問題,阿里提出了AutoDrive平臺。希望通過這個平臺的開發,能更多地采取數據驅動、計算驅動的方式,讓計算機更聰明地找到適合每個場景的算法、參數、結構等,從而提高系統的智能程度。
目前阿里取得了一些初步結果。
在決策規劃上,比如在非常困難的路口碰撞項目上,過去完全依賴人工設計規則和參數,但結果并不令人滿意。采用了數據驅動的方式之后,AutoDrive平臺可以提高16個百分點。
在研發效率上,基于這個平臺,研發效率也能夠獲得極大提高。
在場景精細化上,我們把場景分成25個子類,再進行針對性的優化能把成功率提高18個百分點。這些初步結果,也表明了我們的方向是非常正確的。
再舉一些視覺案例,視覺也是自動駕駛里非常重要的部分,它能捕捉到激光雷達無法得到的語義信息。這些語義信息對于理解場景、預測來說是非常重要的。
對一些典型識別和檢測任務,我們也用AutoDrive平臺進行了計算化智能,在效率和效果上都有很大的提升。比如用人工來設計一個典型的檢測網絡,由于不知道哪些部分是最核心的網絡部分,就可能帶來冗余,但經過AutoDrive平臺的優化之后,可以極大地降低網絡復雜度。因為自動駕駛對實時性要求非常高,降低網絡復雜度可以提高整個效率以及降低對硬件的依賴程度。
最后講一下,AutoDrive背后其實是有非常堅實的工程支撐的,它需要很多的工程電路以及工程經驗的。但AutoDrive平臺能夠運行起來還有幾個要素:
第一、我們將全量的海量數據全部都放在了云上,只有云上才有足夠多的內存和計算資源。將海量自動駕駛數據是放在單獨的服務器,是不可能跑起來。
第二、我們打通了整個AutoDrive運行起來需要的閉環。用計算換智能必須從input到output都有一個完整的結果。所以我們打通了數據收集,數據標注以及仿真、模型訓練、評價等一整套系統,就能知道服務器上的每一個結構能產生什么樣的結果,從而達到計算換智能的效果。
總結一下,我認為未來自動駕駛的研發需要依賴三個要素,這三個要素會進行協同,產生更好的化學反應。
1、場景。過去業界的場景分類過于粗獷,支撐不了no free lunch理論。因此需要研發出一個更好的精細化場景分類方式帶動整個研發體系。
2、算法。需要對算法進行相應的優化,有的放矢地針對每個場景進行處理。
3、自動化平臺、云平臺。為了實現高效的研發,需要AutoDrive自動化平臺,但AutoDrive平臺背后離不開整個云平臺的支撐,包括數據的采集、回歸、仿真、以及模型訓練、測試評價等。
這三個要素結合在一起才能高效地推進自動駕駛技術的研發。
最后再講一下阿里的芯片,過去在整個AI領域里,討論的芯片主要是inference芯片,但我認為訓練芯片需要引起業界的注意。現在業內認為訓練芯片還可以用,那是因為業內還沒有廣泛地應用計算換智能的方式,芯片的一些方法限制了訓練算法的大規模使用,只有解決這個問題,計算換智能才能得到普及。