

研究報告 的搜索結果
-
-
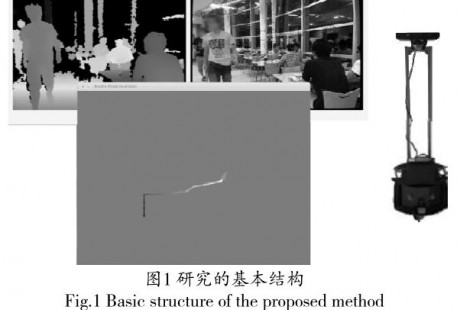
本研究在前人研究的基礎上提出了一種新的算法,利用ICGM的方法提取環境穩定的視覺特征,結合Kinect距離傳感器,在高度動態環...
-
-
-
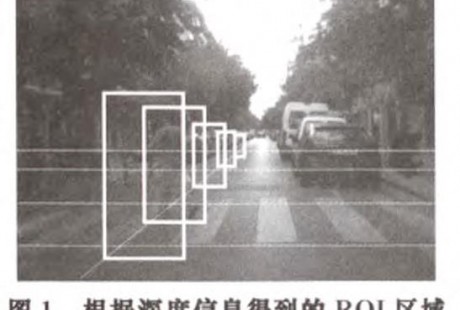
本文提出一種改進的基于車載攝像機角度估計的方法,根據行人的尺寸大小減少待檢測窗口大量。采用類Haar特征以及Real AdaBoost...
-
-
-
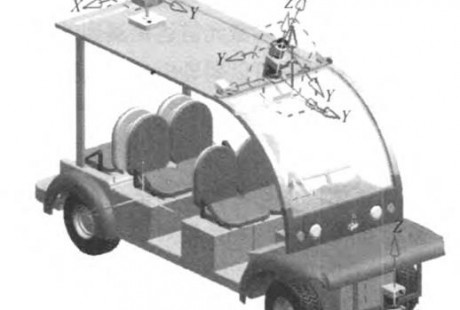
該文提出了一種使用3個激光雷達進行的道路可通行區域檢測方法,該方法包括道路邊界檢測與障礙物檢測兩部分。
-
-
-
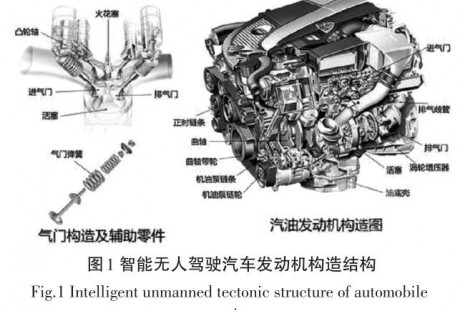
提出一種基于多陣元超聲換能波束指向性分析的智能無人駕駛汽車的發動機故障檢測算法。針對傳統方法的缺點,進行算法改進,提...
-
-
-
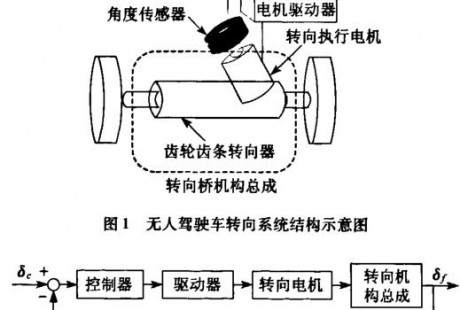
針對無人駕駛車轉向系統具有一定的非線性,工作載荷變化大,易受外界干擾影響的特點,在分析轉向系統動力學特性的基礎上,依...
-
-

-
基于單片機控制及傳感器技術,實現小型汽車可自動尋跡行駛的功能,并且能夠利用光電傳感器檢測道路上的障礙,利用兩個電機的...
-
-
-
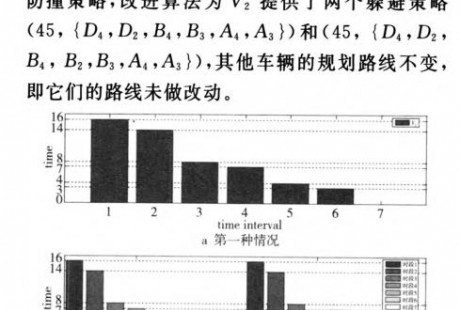
目前存在的無人駕駛車輛的防撞系統在感應到路口有事故發生后,都給出了未進入路口車輛的躲避策略,但對已在路口內部的車輛的...
-
-

-
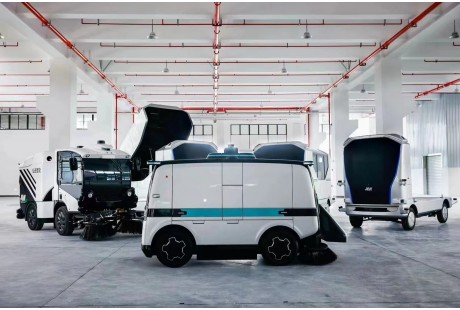
2018年11月26日,深圳市交通運輸委員會表示,深圳將啟動自動駕駛管理政策和道路基礎設施建設的標準研究,為未來自動駕駛在深...
-
-

-
本文從顯示控制系統的角度提出并研究用于無人駕駛系統(以下簡稱無人系統)的顯示控制群自組織問題。
-
![]() 最新新聞
最新新聞



![]() 推薦專題
推薦專題



![]() 產品推薦
產品推薦

MIER-2428MP機架式千兆網管型POE工業以太網交換機
2021-03-16

2020-10-28

2020-10-14

2020-10-09



