

您現(xiàn)在的位置:首頁 > 案例分享:自動(dòng)駕駛3D點(diǎn)云語義分割數(shù)據(jù)標(biāo)注
案例分享:自動(dòng)駕駛3D點(diǎn)云語義分割數(shù)據(jù)標(biāo)注

在自動(dòng)駕駛環(huán)境感知系統(tǒng)中,如何獲取高精度實(shí)時(shí)路況數(shù)據(jù),是決定自動(dòng)駕駛系統(tǒng)行車安全的關(guān)鍵。
目前主流的兩種感知技術(shù)路徑“純視覺”與“高精地圖+激光雷達(dá)”中,由于激光雷達(dá)采集的3D點(diǎn)云路況數(shù)據(jù)更為密集、準(zhǔn)確且具備三維地理信息,因此以3D點(diǎn)云數(shù)據(jù)為基礎(chǔ)的感知算法即成為部分自動(dòng)駕駛企業(yè)的核心技術(shù)路徑,并誕生了規(guī)模龐大的3D點(diǎn)云數(shù)據(jù)標(biāo)注需求。
何為3D點(diǎn)云語義分割
對(duì)3D點(diǎn)云數(shù)據(jù)的標(biāo)注處理,依據(jù)處理方式和使用標(biāo)注工具的不同,大致可以分為三類:
▌純點(diǎn)云
純點(diǎn)云使用的標(biāo)注工具以3D立體框?yàn)橹鳎龢?biāo)注對(duì)象以3D立體框形式標(biāo)出,并附上相對(duì)應(yīng)的屬性信息標(biāo)簽,具體形式如下:
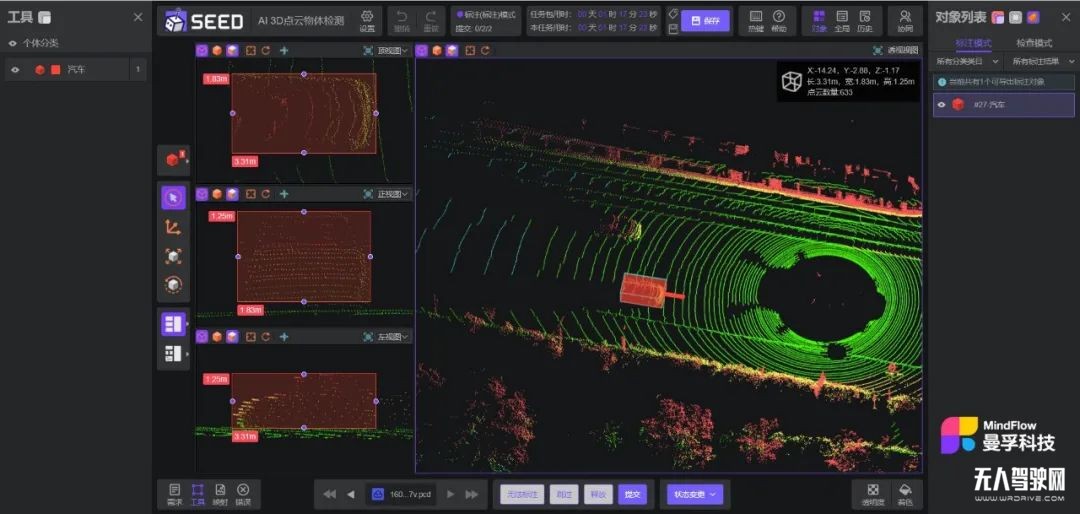
圖片來源:曼孚科技SEED數(shù)據(jù)服務(wù)平臺(tái)
▌融合標(biāo)注
融合標(biāo)注使用的3D標(biāo)注工具仍以3D立體框?yàn)橹鳎?D點(diǎn)云數(shù)據(jù)以外,還需要使用2D標(biāo)注工具在點(diǎn)云數(shù)據(jù)相對(duì)應(yīng)的2D圖像中進(jìn)行標(biāo)注,3D點(diǎn)云數(shù)據(jù)中的標(biāo)注對(duì)象與2D圖像中的標(biāo)注對(duì)象一一對(duì)應(yīng),具體形式如下:
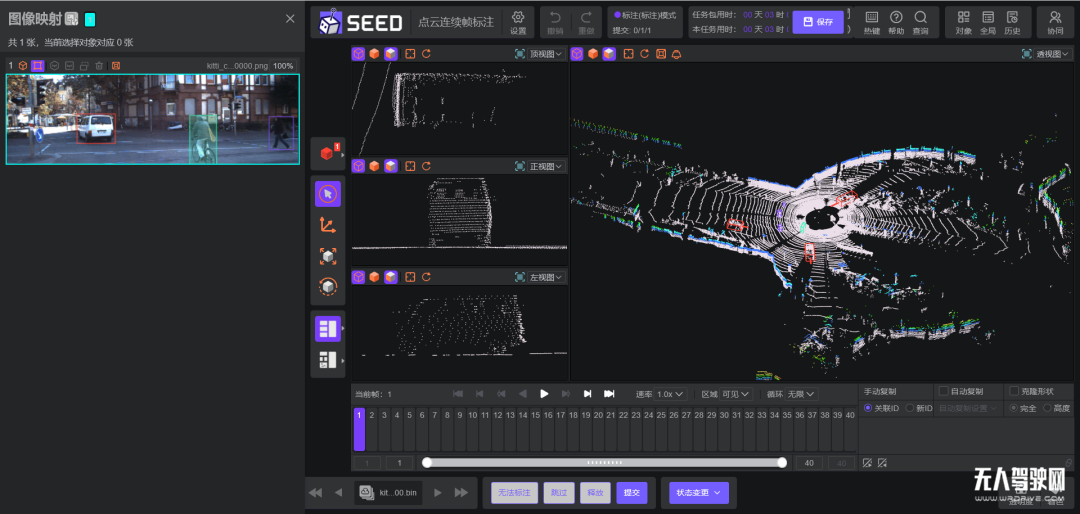
圖片來源:曼孚科技SEED數(shù)據(jù)服務(wù)平臺(tái)
▌3D點(diǎn)云語義分割
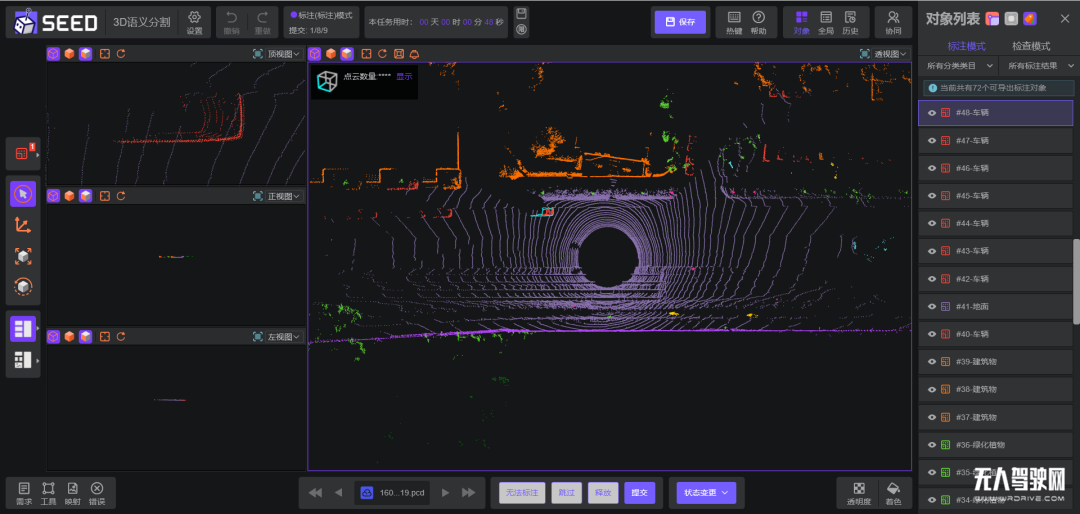
與2D圖像語義分割標(biāo)注邏輯類似,3D點(diǎn)云語義分割也是對(duì)不同的待標(biāo)注對(duì)象進(jìn)行上色分割、賦予語義標(biāo)簽,不同的是3D點(diǎn)云語義分割需要在3維立體點(diǎn)云中對(duì)每個(gè)像素點(diǎn)指定一個(gè)類別標(biāo)簽,比如車輛、行人、道路、建筑物等,具體形式如下:
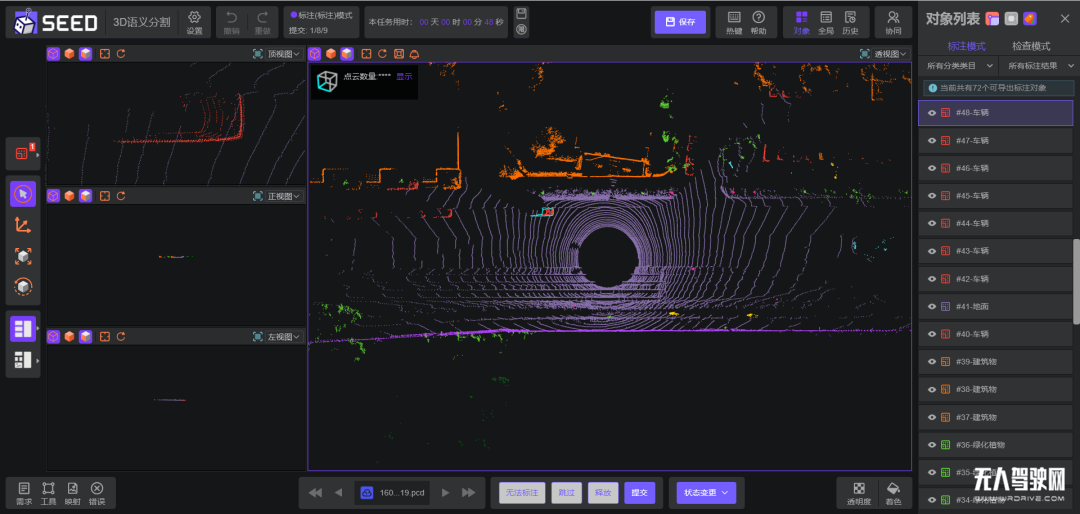
圖片來源:曼孚科技SEED數(shù)據(jù)服務(wù)平臺(tái)
相較于前兩種標(biāo)注方式,在需要更為精細(xì)的空間信息時(shí)(比如自動(dòng)泊車),立體框標(biāo)注場(chǎng)景中如鉸接式公交車等形狀可變的物體,3D點(diǎn)云語義分割標(biāo)注對(duì)路況數(shù)據(jù)的反饋更為精準(zhǔn),因此3D點(diǎn)云語義分割標(biāo)注在自動(dòng)駕駛感知算法中所占的比重也愈發(fā)高漲。
常見標(biāo)注規(guī)則與標(biāo)注對(duì)象
不同算法、不同應(yīng)用場(chǎng)景對(duì)點(diǎn)云語義分割的標(biāo)注需求與規(guī)則也不盡相同,常見的相對(duì)簡(jiǎn)單的自動(dòng)駕駛3D點(diǎn)云語義分割標(biāo)注對(duì)象包括:
1、行人:通常指未騎乘交通工具的人,包含騎滑板車、平衡車的人。
2、騎車人:通常包括騎摩托車、自行車、三輪車、電動(dòng)車等的人。
3、車輛:車輛是3D點(diǎn)云語義分割標(biāo)注場(chǎng)景下最為常見,且子分類較多的對(duì)象。子對(duì)象的劃分有依據(jù)車輛具體車型,比如轎車、卡車、公交車、救護(hù)車等,也有依據(jù)類別,比如客車、貨車、工程車等。
以類別為例,具體如下:
1)微型車:如代步車、各類三輪車等;
2)小型汽車:如轎車、SUV等;
3)客車:如大、中型巴士、雙層巴士等載人車輛;
4)貨車:如廂式貨車等載貨車輛;
5)工程車:灑水車、消防車、垃圾車等;
6)其他車輛。
4、路面相關(guān):與路面相關(guān)的各種對(duì)象,可具體細(xì)分為馬路可行駛區(qū)域、人行道、車道線等。
5、建筑物:如樓房、隧道橋面、橋墩、高架橋等。
6、植物:如草地、樹木等。
7、路面物體:路面物體也是一個(gè)子對(duì)象較多的種類,常見的包括:
1)護(hù)欄:如交通隔離欄、交通護(hù)欄等;
2)柵欄:臨時(shí)性的如交通水馬等;
3)交通標(biāo)志:如紅綠燈、標(biāo)識(shí)牌、桿等;
4)障礙物:如交通錐桶、警示牌、防撞桶、石墩等;
5)其他物體。
8、噪聲點(diǎn)云:如水霧、煙霧、汽車尾氣、雨水等各類噪聲點(diǎn)云。
以上是3D點(diǎn)云語義分割常見的各類標(biāo)注對(duì)象,但不同場(chǎng)景,具體的對(duì)象劃分規(guī)則以及待標(biāo)注對(duì)象種類都存在巨大差異,并沒有統(tǒng)一的標(biāo)準(zhǔn)。
而在更為具體的標(biāo)注規(guī)則上,差異同樣十分巨大。
常見的標(biāo)注規(guī)則如物體起標(biāo)范圍,通常會(huì)規(guī)定點(diǎn)云數(shù)量超過X以上,該物體即需要標(biāo)注,此外還會(huì)規(guī)定模糊無法判定物體的具體標(biāo)注規(guī)則等等,不一而足。
具象化的標(biāo)注實(shí)例如下:
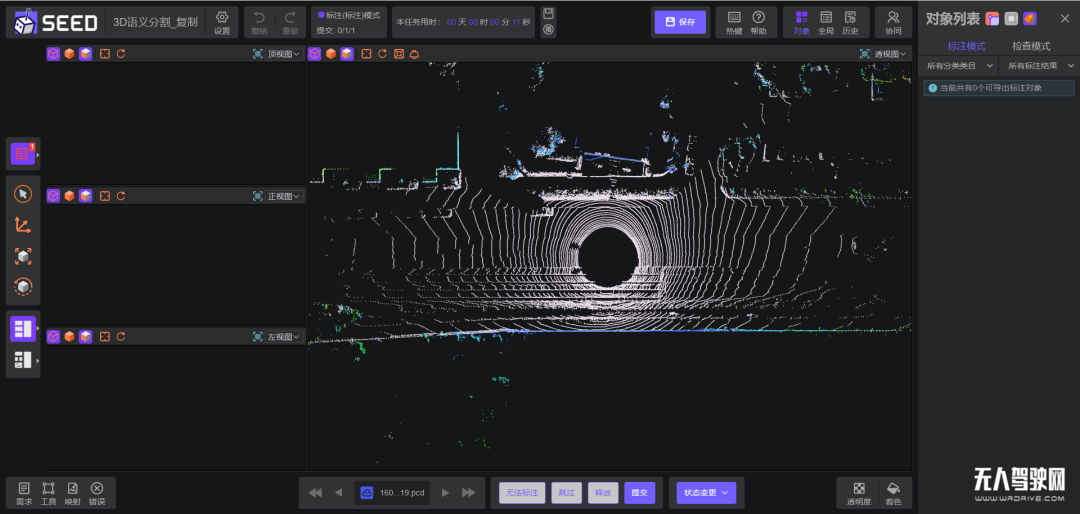
標(biāo)注前(圖片來源:曼孚科技SEED數(shù)據(jù)服務(wù)平臺(tái))
標(biāo)注后(圖片來源:曼孚科技SEED數(shù)據(jù)服務(wù)平臺(tái))
隨著自動(dòng)駕駛商業(yè)量產(chǎn)進(jìn)入新階段,開放路段場(chǎng)景復(fù)雜且多變,需要自動(dòng)駕駛算法有更深的場(chǎng)景積累度與迭代能力,以滿足感知算法與行車安全的需求。
3D點(diǎn)云語義分割更精細(xì)的場(chǎng)景信息反饋,在幫助算法建立更貼合現(xiàn)實(shí)的場(chǎng)景模型,以及提升感知安全方面具備天然優(yōu)勢(shì),在自動(dòng)駕駛邁向大規(guī)模商業(yè)化應(yīng)用的今天,勢(shì)必將扮演更重要的角色。
成員中心
- 廈門星創(chuàng)易聯(lián)科技有限公司
- 青島智騰微電子有限公司
- 巨視慧行(武漢)科技有限公司
- 墨翟科技(上海)有限公司
- 深圳市乾思迪電子科技有限公...
- 廣州市杜格科技有限公司
- 西安海格電氣技術(shù)有限公司
- 深圳市三旺通信股份有限公司
- 深圳市百年星科技有限公司
- 禾純展覽(上海)有限公司
- 華為技術(shù)有限公司
- 上海兆越通訊技術(shù)有限公司
- 廣州美凱信息技術(shù)股份有限公...
- 玖新文化傳媒(上海)有限公...
- 北京銘世博展覽有限公司
- 北京銘世博國際展覽有限公司
- 恒興國際會(huì)展(北京)有限公...
- 廣州領(lǐng)拓儀器科技有限公司
- 北京市龍?jiān)磭H會(huì)展覽有限公...
- 北京市龍?jiān)磭H會(huì)展有限公司